Robot Keseimbangan Dengan Kendali Proporsional-Integral-Derivatif (PID) dan Kalman Filter
DOI:
https://doi.org/10.25299/itjrd.2020.vol4(2).3900Keywords:
Kendali PID, Kalman Filter, Robot Keseimbangan, Sensor Accelerometer MMA731, ATMega32Abstract
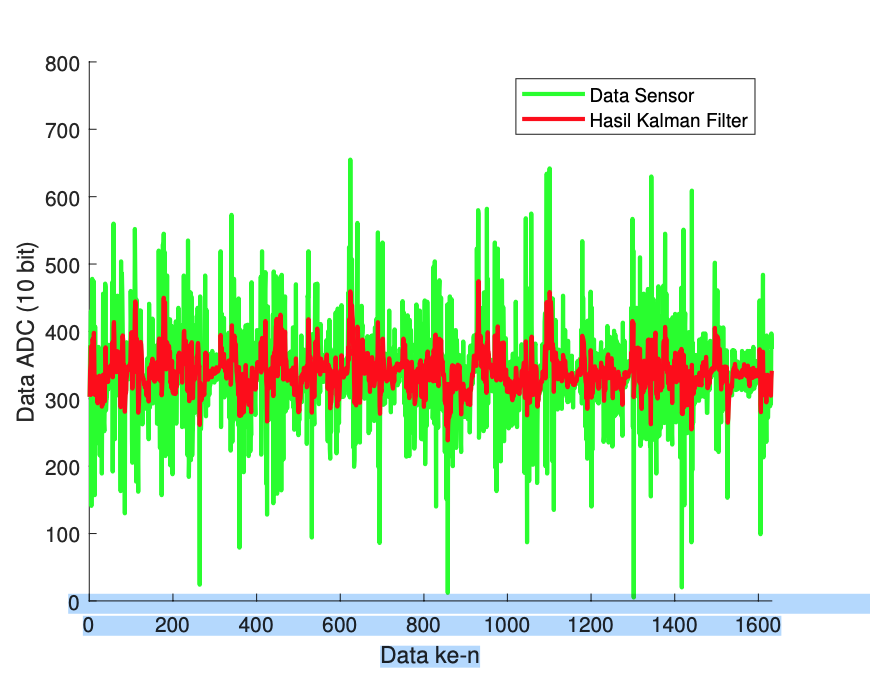
Robot Keseimbangan memiliki dinamika yang cepat, tidak stabil, dan non- linear sehingga memerlukan pengendali yang sesuai. Robot keseimbangan menggunakan sensor accelerometer untuk mengukur perubahan sudut saat bergerak. Sifat sensor tersebut adalah sangat sensitif dan ber-noise sehingga memerlukan metode untuk mengurangi noise tersebut. Pada penelitian ini digunakan pengendali Proporsional Integral Derivatif (PID) untuk mengatasi dinamika tersebut. Kelebihan Pengendali PID adalah memiliki respon yang cepat dan mudah untuk diterapkan. Sementara untuk mengurangi noise pada sensor accelerometer digunakan metode kalman filter. Hasil pengujian me- nunjukkan bahwa metode kalman filter mampu untuk mengurangi noise pada sensor accelerometer. Nilai parameter kalman filter sangat mempengaruhi hasil filter sehingga memerlukan penentuan nilai yang tepat. Nilai matriks variasi proses harus lebih besar daripada nilai matriks variasi pengukuran. Ni- lai parameter kalman filter yang terbaik adalah matriks variasi proses R = 10 dan matriks variasi pengukuran Q = 0, 01. Pengendali PID dapat mensta- bilkan robot pada posisi tegak. Nilai parameter terbaik pengendali PID adalah Kp = 20, Ki = 1, dan Kd = 20.
Downloads
References
Nguyen Gia Minh Thao, Duong Hoai Nghia, and Nguyen Huu Phuc, “A pid backstepping con- troller for two-wheeled self-balancing robot,” in International Forum on Strategic Technology 2010, Oct 2010, pp. 76–81, doi: 10.1109/IFOST.2010.5668001.
F. Sun, Z. Yu, and H. Yang, “A design for two-wheeled self-balancing robot based on kalman filter and lqr,” in 2014 International Conference on Mechatronics and Control (ICMC), July 2014, pp. 612–616, doi: 10.1109/ICMC.2014.7231628.
C. Iwendi, M. A. Alqarni, J. H. Anajemba, A. S. Alfakeeh, Z. Zhang, and A. K. Bashir, “Ro- bust navigational control of a two-wheeled self-balancing robot in a sensed environment,” IEEE Access, vol. 7, pp. 82 337–82 348, 2019, doi: 10.1109/ACCESS.2019.2923916.
M. I. Ali and M. M. Hossen, “A two-wheeled self-balancing robot with dynamics model,” in 2017 4th International Conference on Advances in Electrical Engineering (ICAEE), Sep. 2017, pp. 271–275, doi: 10.1109/ICAEE.2017.8255365.
C. Sun, T. Lu, and K. Yuan, “Balance control of two-wheeled self-balancing robot based on linear quadratic regulator and neural network,” in 2013 Fourth International Conference on Intelligent Control and Information Processing (ICICIP), June 2013, pp. 862–867.
H. F. Murcia and A. E. Gonza ́lez, “Performance comparison between pid and lqr control on a 2-wheel inverted pendulum robot,” in 2016 IEEE Colombian Conference on Robotics and Automation (CCRA), Sep. 2016, pp. 1–6, doi: 10.1109/CCRA.2016.7811420.
You Yunong, Hwi-Myung Ha, Yun-Ki Kim, and Jang-myung Lee, “Balancing and driving con- trol of a ball robot using fuzzy control,” in 2015 12th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Oct 2015, pp. 492–494.
K. Ogata, Modern Control Engineering. Prentice Hall, 2010.
A. Maarif, S. Iskandar, and I. Iswanto, “New design of line maze solving robot with speed controller and short path finder algorithm,” International Review of Automatic Control (IREACO), vol. 12, no. 3, pp. 154–162, 2019, doi: 10.15866/ireaco.v12i3.16501.
A. Ma’arif, A. I. Cahyadi, O. Wahyunggoro, and Herianto, “Servo state feedback based on coefficient diagram method in magnetic levitation system with feedback linearization,” in 2017 3rd International Conference on Science and Technology - Computer (ICST), July 2017, pp. 22–27, doi: https://doi.org/10.1109/ICSTC.2017.8011846.
A. Maarif, A. I. Cahyadi, S. Herdjunanto, Y. Yamamoto et al., “Tracking control of higher order reference signal using integrators and state feedback.” IAENG International Journal of Computer Science, vol. 46, no. 2, 2019.
A. Ma’arif, A. imam Cahyadi, and O. Wahyunggoro, “Cdm based servo state feedback con- troller with feedback linearization for magnetic levitation ball system,” International Journal on Advanced Science, Engineering and Information Technology, vol. 8, no. 3, pp. 930–937, 2018, doi: http://dx.doi.org/10.18517/ijaseit.8.3.1218.
R. Uswarman, S. Istiqphara, and D. H. T. Nugroho, “Sliding mode control with gain scheduled for magnetic levitation system,” Jurnal Ilmiah Teknik Elektro Komputer Informatika, vol. 5, no. 1, pp. 36–43, 2019, doi: http://dx.doi.org/10.26555/jiteki.v5i1.13223.
M. Grewal and A. Andrews, Kalman Filtering: Theory and Practice with MATLAB, ser. Wiley - IEEE. Wiley, 2015.
S. Nurmaini and S. Pangidoan, “Localization of leader-follower robot using extended kalman filter,” International Review of Automatic Control (IREACO), vol. 7, no. 2, pp. 95–108, 2018, doi: 10.18495/COMENGAPP.V7I2.253.
M. Han, K. Kim, D. Y. Kim, and J. Lee, “Implementation of unicycle segway using unscented kalman filter in lqr control,” in 2013 10th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Oct 2013, pp. 695–698, doi: 10.1109/URAI.2013.6677427.
W. K. Barlian Henryranu Prasetio, “Uji performansi ensemble kalman filter untuk mengurangi noise pengukuran sensor pada robot,” International Journal of Electri- cal and Computer Engineering (IJECE), vol. 2, no. 2, pp. 96–101, 2015, doi: http://dx.doi.org/10.25126/jtiik.201522139.
M. Safitri and N. H. Wijaya, “Sistem penapisan derau pada sensor inersia wahana tanpa awak quadrotor,” Simetris: Jurnal Teknik Mesin, Elektro dan Ilmu Komputer, vol. 7, no. 2, pp. 753– 760, 2016, doi: 10.24176/simet.v7i2.791.
S. H. R. H. Lasmadi Lasmadi, Adha Imam Cahyadi, “Inertial navigation for quadrotor using kalman filter with drift compensation,” International Journal of Electrical and Computer Engi- neering (IJECE), vol. 7, no. 5, pp. 2596–2604, 2017, doi: 10.11591/ijece.v7i5.pp2596-2604.
E. A. Agus N.A. Syarifuddin, Dian A. Merdekawati, “Perbandingan metode kalman filter, extended kalman filter, dan ensemble kalman filter pada model penyebaran virus hiv/aids,” Journal Mathematics and its Aplications, vol. 15, no. 1, pp. 17–29, Maret 2018, doi: http://dx.doi.org/10.12962/limits.v15i1.3344.
N. Ngatini and H. Nurhadi, “Estimasi lintasan auv 3 dimensi (3d) dengan ensemble kalman filter,” Journal Mathematics and its Aplications, vol. 4, no. 1, pp. 12–21, 2019, https://doi.org/10.35314/isi.v4i1.774.
T. Herlambang, “Estimasi posisi magnetic levitation ball menggunakan metode akar kuadrat ensemble kalman filter (ak-enkf),” R.E.M. (Rekayasa Energi Manufaktur) Jurnal, vol. 2, no. 1, pp. 45–49, 2017, https://doi.org/10.21070/r.e.m.v2i1.768.
M. S. R. Hamzah Ahmad, Nur Aqilah Othman, “A solution to partial observabil- ity in extended kalman filter mobile robot navigation),” TELKOMNIKA Telecommu- nication, Computing, Electronics and Control, vol. 16, no. 1, pp. 134–141, 2018, http://dx.doi.org/10.12928/telkomnika.v16i1.9025.
A. Ma’arif, H. Nabila, Iswanto, and O. Wahyunggoro, “Application of intelligent search algorithms in proportional-integral-derivative control of direct-current motor system,” Jour- nal of Physics: Conference Series, vol. 1373, p. 012039, nov 2019, doi: 10.1088/1742- 6596/1373/1/012039.
Downloads
Published
How to Cite
Issue
Section
License
This is an open access journal which means that all content is freely available without charge to the user or his/her institution. The copyright in the text of individual articles (including research articles, opinion articles, and abstracts) is the property of their respective authors, subject to a Creative Commons CC-BY-SA licence granted to all others. ITJRD allows the author(s) to hold the copyright without restrictions and allows the author to retain publishing rights without restrictions.